您好,欢迎访问畅享科技!
- 联系我们
- 关注微信

您好,欢迎访问畅享科技!
全国免费咨询热线
185-8849-8922
免费咨询热线
185-8849-8922柔性电子内窥镜在固态成像和机械设计方面体现了超过3年的改进。可以使用许多不同的模型,每个模型都有一些略有不同的功能,并且每个模型都针对要检查的胃肠道(GI)部分进行了优化。尽管已经提出了用于内窥镜控制部分的替代设计(例如,“手枪式握把”),但是自从引入柔性内窥镜以来,器械的基本形状和布局相对不变。所有柔性电子内窥镜的基本组件和控件都相似(图3.1)。
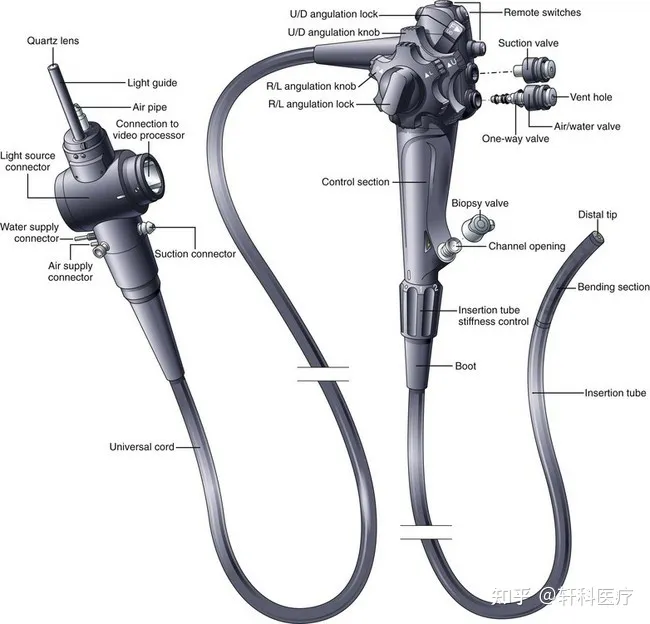
图3.1 标准柔性内窥镜的基本组件。
该仪器设计为由内镜医师的左手握持和操作。一些医生用他们的左手食指交替控制吸气阀和空气/水阀,而其余的手指握住仪器。其他人则将其左食指用于吸入阀,将中指用于空气/水阀,并用无名指和小手指抓住仪器。上下成角度的旋钮由医师的左手拇指操纵。左右角度旋钮由左手的拇指和前两个手指或右手控制。内窥镜医师的右手主要用于控制插入管-必要时推动,拧紧和抽出。
插入管
内窥镜的插入管是专为胃肠病学设计的内窥镜之间的主要区别特征。尽管根据内窥镜的应用存在明显的差异(例如,肠镜的超长长度,经鼻食管镜的厚度),但内窥镜型号之间的微妙差异同样重要。对于结肠镜尤其如此。尽管出于各种原因内镜医师可能更喜欢使用特定的结肠镜,但是该仪器的插入管特性比其他任何因素都更可能导致内窥镜医师选择特定的结肠镜作为选择的仪器。如果仪器的任何单一规格都能确定内窥镜医师插入仪器的速度和简便性,那就是插入管的机械特性。
内窥镜制造商已投入大量精力来完善插入管的结构并选择理想的材料。图3.2显示了典型结肠镜的内部组件。插入管通常包含(1)1个用于抽吸(活检),空气和供水的管;(2)经常有一个用于向前喷水的附加管;(3)四根角度控制线;(4)细电线,将内窥镜远端的电荷耦合器件(CCD)图像传感器连接到视频处理器;(5)玻璃纤维,用于将来自光源的光引入内窥镜的远端。具有可调节插入管柔韧性的结肠镜具有一个附加组件-一根张紧线以控制插入管的刚度。十二指肠镜还具有沿插入管的长度延伸的附加金属丝/线圈护套,用于控制钳子升降器的上下位置(请参阅后面的讨论)。内窥镜设计师的任务是将所有这些单独的组件包装在尽可能小的空间中,同时仍为组件提供自由移动的空间,而不会损坏通过扭力和弯曲而产生的更易碎的元件(CCD导线,光纤束)。在使用过程中。将干粉状润滑剂涂在所有内部组件上,以减少在插入管操作期间它们相互施加的应力。
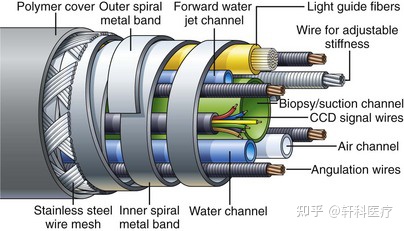
图3.2 可变硬度结肠镜的内部组件。
纤维插入管
如前所述,插入管的操作特性重要,特别是对于结肠镜而言。为了易于插入,该仪器必须能够准确传输内镜医师施加的所有细微运动和扭矩。内窥镜医师施加于轴近端部分的任何旋转(扭矩)都必须以1:1的比例传递至器械的远端,尽管这种能力会在器械成环时失去。扁平的螺旋金属带正好在插入管皮下延伸,从而增强了仪器的扭转能力(见图3.2)。由于这些带的缠绕方向相反,因此在管子受到扭转时它们会相互锁定,从而将管子一端的旋转准确地传递到另一端。同时,这些螺旋带之间的间隙使轴可以自由弯曲。这些带也使插入管呈圆形。它们的刚度可防止插入管的内部组件受到外力挤压。这些螺旋带被编织成管状网的细丝不锈钢丝覆盖。将塑料聚合物层(通常为黑色(在结肠镜上为深绿色))挤出到该金属丝网上,以创建插入管的光滑外表面。聚合物层为插入管提供了无创,生物相容和水密的表面。
经验表明,对于检查上消化道的固定解剖结构而言,更坚固的插入管是良好选择。结肠具有曲折和可自由移动的环,用更灵活的仪器检查。仪器应足够松散(非刚性),以易于适应患者的曲折解剖结构,并在结肠壁和肠系膜上施加小的力。器械还应具有足够的柱强度,以防止在推动器械的近端时发生弯曲。结肠镜除具有灵活性外,还应具有足够的弹性,以使其在向后拉时会弹回拉直状态。这有助于消除循环。
获得柔韧性,弹性,柱强度和扭转能力的组合是插入管设计的艺术和科学。这些特性之一的改进通常会对其他一个或多个负面影响。设计通常是这些理想特性之间的折衷,经过几个月的临床测试证实。为了进一步改善插入,胃镜和结肠镜插入管的柔性通常在端部到端部之间变化。正如图3.3示出,远端40cm的结肠镜插入管的是显著比近侧部分更柔软。柔性的这种变化是通过在制造过程中改变管的外部聚合物层在金属丝网上挤出时的配方来实现的。正如图3.4如图所示,挤出机包含两种类型的树脂,一种明显比另一种硬。当插入管的远端穿过机器时,一层柔软的树脂被应用到丝网的远端40厘米处。在靠近管中部的过渡区域内,这种软树脂逐渐被硬树脂替代。插入管的近端部分(50至160 cm)仅由硬质树脂制成。结果是插入管具有柔软的远侧部分,可无创地弯曲通过弯曲的结肠,而较硬的近侧部分可有效防止结肠中已被结肠镜矫正的部分中的环再形成。
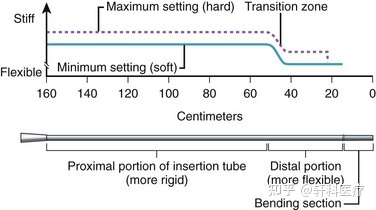
图3.3 插入管硬度的图形表示。请注意变化之处-远端40厘米更柔韧。当仪器处于“硬性”设置(虚线)相对于“软”设置(实线)时,请注意额外的刚度。
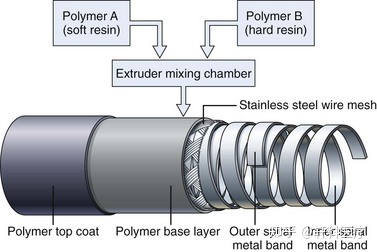
图3.4 插入管盖的组成。
可调的纤维管
临床经验表明,内镜医师通常对理想的插入管的构成意见不一。这种分歧可能是由于培训,插入技术或以往经验的差异所致。另外,一些内窥镜医师表示希望在手术过程中根据插入深度或根据患者的解剖结构来改变插入管的特性,这导致了可弯曲的插入管的发展。
可弯曲的结肠镜具有一根张紧线,该张紧线沿着插入管的长度延伸(见图3.2)。通过旋转插入管近端(控制部分正下方)的一个环来控制此钢丝中的张力量(图3.5)。当拉线在此加固系统中处于“软”位置时,除金属丝网和聚合物涂层所提供的强度外,加固系统不会为插入管提供额外的强度。正如图3.5如图所示,当控制环旋转到“硬”位置之一时,控制环中的倾斜槽会拉动拉线末端的滑销,拉伸拉线并将其置于较大的张力下。该张力使围绕拉线的线圈线变硬,并为插入管增加了很大的刚度。正如图3.3示出了,尽管在插入管的底部刚度是由在聚合物基体层改变硬和软树脂的混合物建立,插入管,可以进一步在将由刚度控制环旋转过程期间加强。可变刚度机构不会在插入管的整个长度上延伸,从而不会影响内窥镜的远端部分。
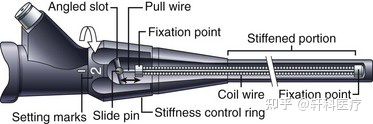
图3.5 可变刚度结肠镜的旋转机构。
远端头
图3.6图1示出了在典型的端视内窥镜例如胃镜或结肠镜的远侧末端中发现的组件。远端尖端上较大的圆形玻璃镜片是物镜。该透镜将GI粘膜的微型图像聚焦在固态CCD图像传感器的表面上。图像传感器通过一组细的电线将连续的图像流发送回视频处理器。物镜和CCD单元紧密密封,以防止冷凝水使图像模糊不清,并防止流体意外进入仪器而损坏成像系统。照亮身体内部的光通过光纤照明纤维穿过仪器。该光通过导光透镜系统均匀地分散在内窥镜的视场上。
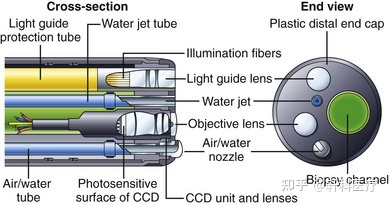
图3.6 结肠镜远端头组件。
有些内窥镜只有一个照明系统(如图3.6所示)。其他内窥镜型号具有两个光纤束和两个导光镜,以改善活检钳两侧(例如圈套器)的照度,并有助于将组件包装在插入管内。用于活检和抽吸的通道靠近远端尖端上的物镜。活检通道相对于物镜的位置决定了附件进入视野时图像中的外观。在某些仪器上,圈套器或活检钳似乎从图像的右下角散发出来。在其他乐器上,这些配件从左下角进入视野,依此类推。当计划困难的手术时,例如分段息肉切除术或止血药,
插入管还包含一些小管,这些小管将空气和水输送通过仪器(见图3.2)。这些管通常合并成距离远端几英寸的单个管(进一步参见图3.9)。该组合的空气/水管连接到仪器末端的空气/水喷嘴。在内窥镜医师的控制下,可以将水注入物镜以对其进行清洁,或者可以从喷嘴注入空气以注入胃肠道。一些胃镜和结肠镜在远端有一个额外的水管和一个喷水喷嘴,用于洗刷粘膜上的碎屑(见图3.6)。
图3.7说明了一个典型十二指肠镜远端的组件。图3.7A图A是在十二指肠镜的远端发现的光学和照明系统的示意性截面图。现在,用于观察组织的物镜位于远端的侧面,而不是位于器械的尖端。棱镜用于将视角偏转90至105度,并将仪器转换为侧视内窥镜。照明光纤同样在仪器的顶端急剧弯曲,使光线从侧面发出。如同在端视仪器中一样,位于物镜附近的空气/水喷嘴将水引导穿过透镜进行清洁,然后用空气吹走残留的水滴。来自该喷嘴的空气也用于给患者吹气。所有十二指肠镜都有钳子升降器,以使通过通道的任何附件的尖端主动偏转。电梯机构如图图3.7B。该升降机通常位于内窥镜尖端内的凹处(降低位置)。当内镜医师希望将附件抬高到视野中时,他或她在器械控制部分(未显示)上操作拇指控件。该拇指控制器拉动电梯钢丝,将电梯从其凹槽中提升到升高的位置,从而将附件的尖端向上偏转到视野中。在某些仪器中,例如V型观测仪(奥林巴斯公司,纽约州梅尔维尔),该升降机具有一个小凹槽,该凹槽会束缚0.035英寸的导丝,以在更换附件时帮助稳定导线。
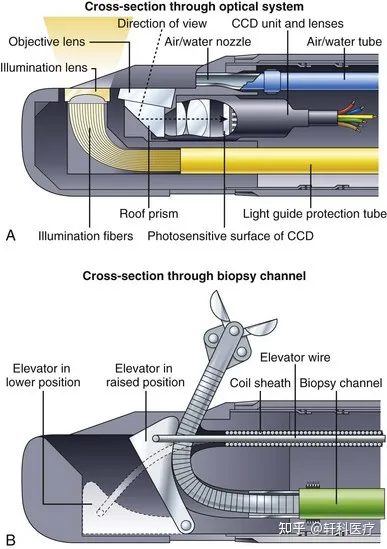
图3.7 A和B,十二指肠镜远端头组件。
弯曲部分和末端角度
内窥镜医师还可以操纵内窥镜插入管的远端。可弯曲部分,称为弯曲部分,其构造不同于插入管的其余部分。正如图3.8如图所示,弯曲部分由一系列形状奇特的金属环组成,每个金属环都通过一个自由移动的接头连接到该环的两侧。这些关节是使用一系列枢轴销构造的,每个枢轴销都与相邻枢轴偏移90度。一组枢轴允许弯曲部分在上下方向上卷曲。第二组允许弯曲部分在左右方向上卷曲。它们一起使弯曲部分可以在任何方向卷曲。卷曲的方向由四根成角度的金属丝控制,它们沿着插入管的长度延伸(见图3.2)。这四根线在3点,6点,9点和12点位置牢固地连接到弯曲部分的末端。拉动附接在12点钟位置上的线引起的向上方向并且实现弯曲部到卷曲什么内镜称之为“ 向上末端偏转。”拉动连接在3点钟位置上的线引起右前端偏转。拉其他两根导线会导致向下和向左偏转。内镜医师可以通过旋转上下或左右角度旋钮,依次拉动每根电线。(为简单起见,图3.8 一起旋转上下和左右旋钮可产生组合的末端移动(例如,向上和向右移动),并允许内镜医师扫过内窥镜在任何方向上。
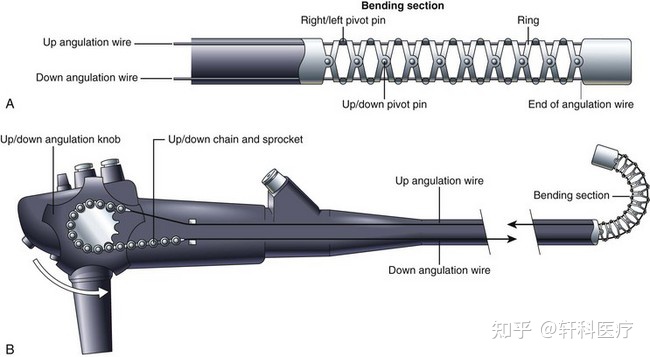
图3.8 A,弯曲部分的结构。B,角度旋钮的旋转导致弯曲部分变形。
空气,水和吸气系统
典型的内窥镜空气,水和抽吸系统的示意图如图3.9所示。光源中的气泵在适度的压力下向从内窥镜的光源连接器伸出的管道提供空气。空气通过空气通道(管)输送到控制部分上的空气/水阀。如果未覆盖此阀,则空气仅从阀顶部的通风孔排出(见图3.1)。该通风孔可使气泵在不需要空气时自由泵送,从而减少了泵的磨损。如果内窥镜医师想给患者吹气,他或她用指尖覆盖通气孔;这将关闭通风孔并迫使空气向下通过空气通道,并通过远端尖端上的喷嘴离开仪器。空气/水阀的轴上装有一个单向阀(见图3.1)。在检查过程中保持患者体内的空气畅通。在内窥镜检查期间,通常会将胃肠道吹入略高于大气压的压力。如果不是该系统中的单向阀,则来自被检查器官的空气将流回到远端尖端的喷嘴中,向上流过插入管中的空气通道,然后从空气/水阀中的孔中流出。每当操作员从阀门上移开他或她的手指时。需要使用防回流阀以使患者充满气息。
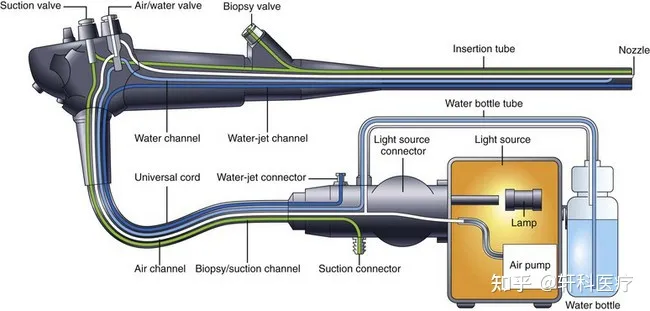
图3.9 空气,水和抽吸系统的组件。
在此过程中,用于清洁物镜的水被存储在与光源或推车相连的水瓶中(见图3.9)。空气泵除了为充气提供空气外,还对该水容器加压,迫使水从瓶子中出来并进入内窥镜。该水通过水瓶盖上的管子输送到内窥镜的光源连接器,然后通过通用电缆上的水道通向空气/水阀。当内窥镜医师按下空气/水阀时,水继续沿着插入管中的水通道向下流动,并从远端的喷嘴流出。喷嘴将水引导至物镜表面,对其进行清洁。
抽吸也由内窥镜控制部分上的阀门控制。抽吸源(医院的墙壁抽吸系统或便携式抽吸泵)连接到内窥镜的光源连接器。当内窥镜医师按下吸气阀时,吸力将被施加到插入管内的吸气/活检通道上。在内窥镜远端出现的任何流体(或空气)都被吸入抽吸收集系统。通道打开阀(也称为活检阀)关闭活检通道的近端开口,并防止室内空气被吸入抽吸收集系统。
空气,水和吸气系统的设计中有几个固有的安全特性,如图3.9所示。空气供应系统没有活动部件,也没有机械阀会粘在连续的“开启”位置,从而导致患者意外过度吹入。取而代之的是,空气只是从阀上的排气孔中排出,除非医生的手指在该开口上,并且如果抽吸系统受阻且内镜医师难以解决可能的过度吹入,他或她就可以迅速从内窥镜上卸下所有阀门。该动作停止所有空气和水的供给,并允许患者的胃肠道通过打开的气瓶减压。
照明系统
内窥镜使用不相干的光纤束将光从外部光源传输到内窥镜的远端。该光纤束由数千根头发状的玻璃纤维(直径30 μm)组成,这些玻璃纤维经过光学涂覆,可将光捕获在光纤内,并通过称为全内反射的现象从一端到另一端传输光。进入这种光纤一端的光线在离开光纤的另一端之前,会从光纤壁反射数千次。仔细选择用于制造光纤纤芯和包层的玻璃类型以及纤芯和包层的厚度,以使光纤束能够承载尽可能多的光
内窥镜光源通常使用300瓦氙弧灯来产生视频内窥镜所需的强烈白光。这些灯还会产生大量热量。光源内的散热器,红外滤镜和强制风冷系统可防止内窥镜的纤维束过热和燃烧。仔细检查内窥镜光导的尖端,可以看到一个耐烧石英透镜,该透镜可用来收集来自光源灯的光并将其引导到内窥镜中(见图3.1)。在内窥镜的另一端,仪器远端的导光透镜将这种光均匀地散布在整个视野上(见图3.6)。光源中的自动控制的光圈(iris)可控制从内窥镜尖端发出的光的强度。
当内窥镜位于胃等大腔内且需要大量光线时,光源中的光圈会打开,从而使内窥镜能够透射大的光线。当内窥镜尖端靠近粘膜并且照明很亮时,光源中的光圈会自动关闭以减少从光源射出的光量。如果照明度太低,则监视器上的视频图像会暗淡且颗粒状。如果照明太强,则显示屏上的图像会被冲洗掉(即“花开”)。视频处理器通过仔细控制光源产生的光量,自动将照明亮度保持在CCD图像传感器可接受的范围内。
固态图像捕获
视频内窥镜中使用的图像传感器通常称为CCD。这些传感器是由硅半导体材料构成的固态成像装置。传感器表面的硅对光有反应。当光子撞击CCD的光敏表面时,它会将电子从表面的硅原子中置换出来。在硅材料中会产生自由的带负电荷的电子,以及先前与电子结合的硅晶体结构中相应的带正电荷的“空穴”。此动作称为光电效应,如图3.10所示。当更多的光子撞击传感器的表面时,就会产生更多的自由电子和相应的其他空穴。传感器中累积的电荷与落在CCD上的光量成正比。同样,无论落在传感器上的光的颜色如何,都会产生这些电荷。
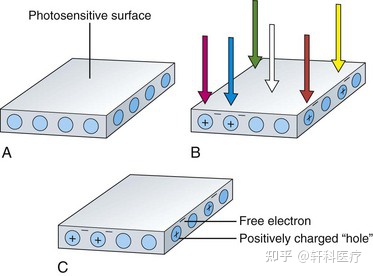
图3.10 光电效应。A,光敏表面。B,光子撞击表面会释放电子,从而在材料内产生电荷积聚。C,在光线照射结束后,电荷仍然保留。
尽管单个光敏元件可用于测量落在表面上的光的亮度(例如在照度计中),但它无法复制图像。要重现图像,必须将光敏表面分成几千个独立的小光点矩阵。当图像聚焦在这种传感器的表面上时,图像的亮度将在矩阵内的每个单独的光点处自动测量。知道图像中每个点的亮度可以使视觉系统准确地再现图像。CCD是这种固态视觉系统的常见组件。CCD图像传感器的表面分为离散的光斑的矩形阵列,分别称为图片元素或像素。图3.11图1示出了具有这种阵列的CCD传感器。在视频图像内窥镜中,CCD位于仪器的远侧尖端,位于物镜的正后方(如图3.6所示)。物镜将观察到的粘膜的微型图像直接聚焦在该传感器的表面上。由于先前描述的光电效应,落在CCD上的光的图案(即图像)立即转换为存储的电荷阵列。由于存储在每个单独像素中的电荷与相邻像素隔离,因此传感器可以将光学图像忠实地转换为图像的电子副本。
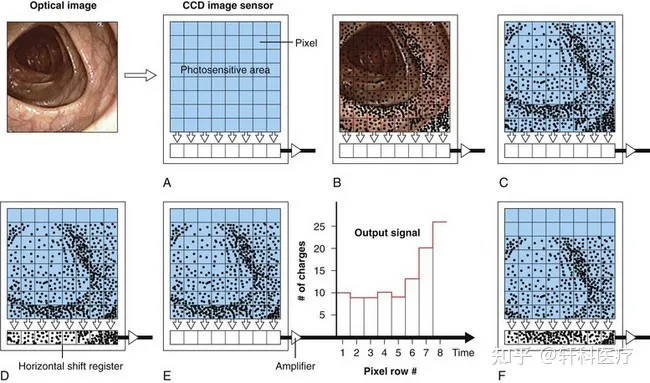
图3.11 使用线转移电荷耦合器件(CCD)进行图像捕获和读出。尽管实际的内窥镜CCD包含数十万个像素,但为简单起见,所示的阵列包含以8行×8列矩阵排列的64个像素。A,粘膜图像投射在CCD的感光表面上。
文章摘自:软管式内窥镜的结构图
Copyright © 2002-2023 深圳市畅享科技有限公司 版权所有 粤ICP备18100137号-1 XML地图



